Kinematic Self-Replicating Machines
© 2004 Robert A. Freitas Jr. and Ralph C. Merkle. All Rights Reserved.
Robert A. Freitas Jr., Ralph C. Merkle, Kinematic Self-Replicating Machines, Landes Bioscience, Georgetown, TX, 2004.
5.1.8 Suthakorn-Chirikjian Categorization of Self-Replicating Robots (2002-2003)
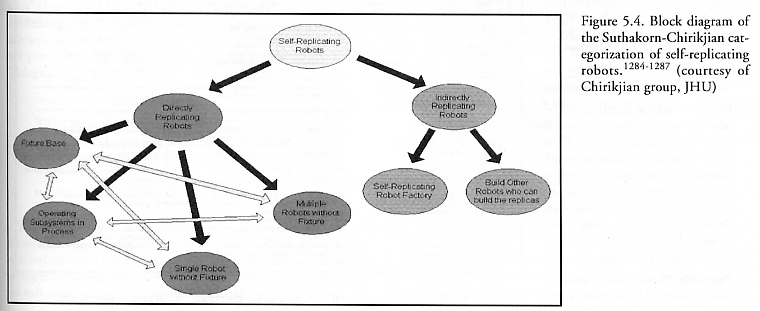
Gregory Chirikjian and Jackrit Suthakorn, a graduate student in Chirikjian’s group at Johns Hopkins University, have pursued an active research program on macroscale kinematic self-replicating systems (Section 3.23). The group settled on a simple, pragmatic operational definition [1284-1286] of self-replication as “the process of assembling a functional robot from passive components – the robot that is assembled (the replica) is an exact copy of the robot doing the assembling.” Suthakorn’s categorization of self-replicating robots (Figure 5.4) makes a primary distinction according to their behavior: Directly Replicating (a robot capable of producing an exact replica of itself in one generation) and Indirectly Replicating (a robot capable of producing one or more intermediate robots that are in turn capable of producing replicas of the original) [1284-1287].
Directly Replicating robots are classified into four subgroups depending on the characteristics of their self-replication processes. These four subgroups are described by Suthakorn [1284-1287] as follows:
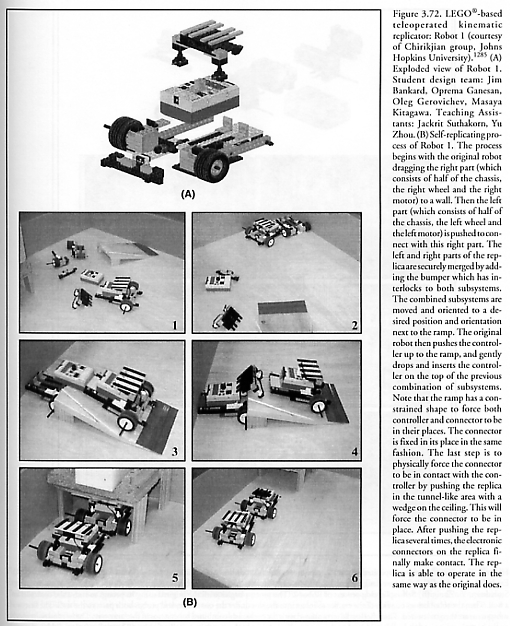
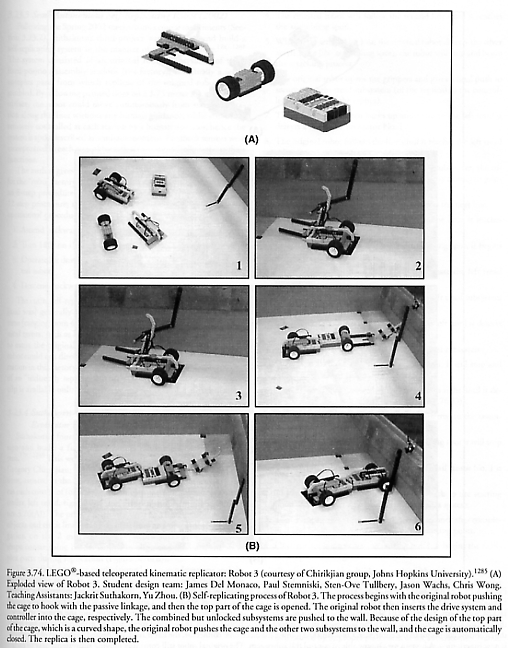
(1) Fixture-Based Replication. Robots in this group depend on external fixtures (ranging from simple hooks to complex structures for restraining delicate parts during assembly) to complete the self-replication process (Figures 3.72 and 3.74). Some subsystems may require high precision positioning for assembling parts. Passive fixtures can assist in this because of the shape constraints that they impose, and push-pull fixtures are helpful as well. Fixtures serve as a substrate or catalyst to assist in the self-replication process, but are themselves not actuated.
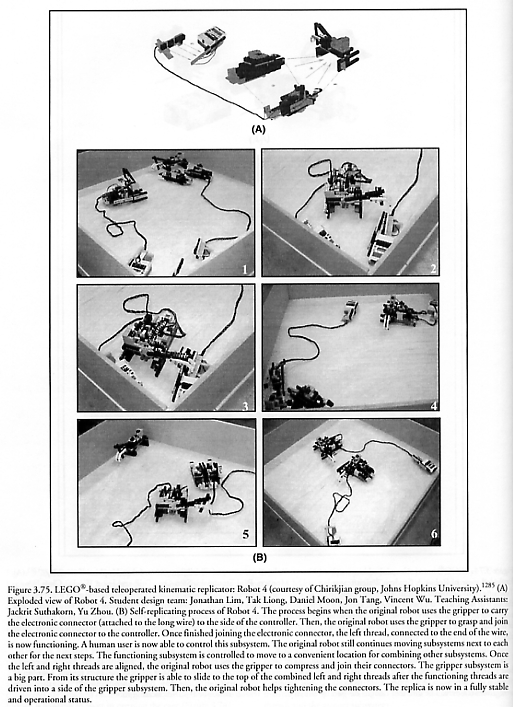
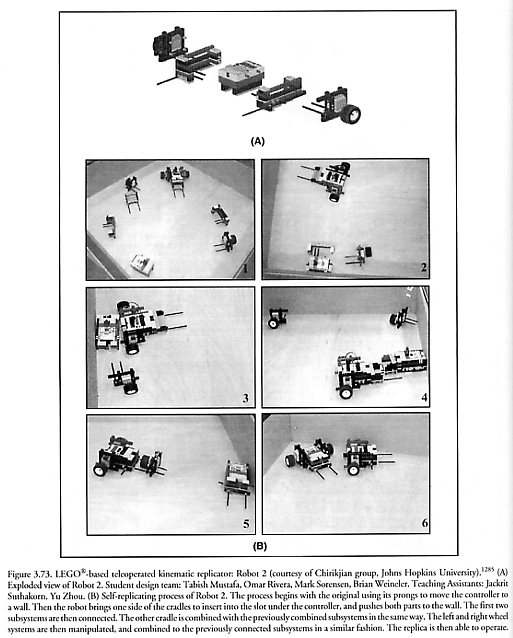
(2) Operating-Subsystem-in-Process Replication. In this group, one or several subsystems of the replica can operate before the replica itself is fully assembled. These subsystems can then assist the original robot during its assembly of its replica (Figure 3.75). This assistance can come in many forms – for instance, with functioning subsystems helping to align, manipulate, or transport parts.
(3) Single-Robot-without-Fixture Replication. In this group, a single robot finishes the self-replication process and depends only on the available environment (Figure 3.73). The complexity of the subsystems or the number of subsystems in the replica is usually very low for this experimental group because without fixtures or multiple cooperating robots, it is more difficult to position large numbers of subsystems with the requisite high precision to achieve successful replication. (This does not challenge the idea of a self-contained molecular assembler because a robot can have fixtures integral to it, and because if the subsystems are of sufficiently low complexity (i.e., atoms) the robot can incorporate large numbers of them.)
(4) Multi-Robot-without-Fixture Replication. In this group, multiple robots work together in the self-replication process without the assistance of fixtures. A major advantage is the reduction of the time required for self replication because different stages can be completed in parallel. A disadvantage is that there may be interference problems among robots, requiring robots to possess a greater awareness of their surroundings. Another disadvantage is that multiple robots require multiple replicas to be produced.
Indirectly Replicating robots have as their primary characteristic that the original robot or group of robots must work together to build a robot-producing factory or some type of intermediate robot or robots, which are subsequently able to produce replicas of the original robots or assist the original robot in replicating. In this category the original robots lack the ability to directly assemble copies of themselves. Indirectly Replicating robots may be classified into two subgroups, described by Suthakorn [1284-1287] as follows:
(1) Intermediate Robot Replication. In this group, the original robot works alone or with other robots, with or without passive fixtures, to fabricate an intermediate robot or robots. The intermediates have the ability to fabricate, or assist in fabricating, replicas of the original robot that the original robot does not possess.
(2) Self-Replicating Factory. Here the original robot works independently or in a group to construct a factory consisting of automated workcells that can then manufacture replicas of the original robot. This differs from intermediate robots and passive fixtures because workcells are fixed automation elements that can be fully actuated.
Last updated on 1 August 2005
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}