Kinematic Self-Replicating Machines
© 2004 Robert A. Freitas Jr. and Ralph C. Merkle. All Rights Reserved.
Robert A. Freitas Jr., Ralph C. Merkle, Kinematic Self-Replicating Machines, Landes Bioscience, Georgetown, TX, 2004.
6.3.7 Macroscale-Inspired Machinery Will Not Work at the Nanoscale
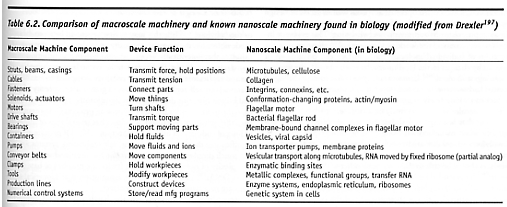
A seventh criticism is that designs of molecular machine systems that resemble forms derived from macroscale machinery might not work [2310], or will be outmoded by better designs in the future because possibly new forms of machinery that might be better suited to the nanoscale have yet to be discovered or invented. There is an even more general objection that things are too wiggly, squishy, and sticky at the nanoscale for any machine-like paradigm to work, and that structures like gears, levers, motors and so on won’t work at the nanoscale because “things are just so different at that scale.” Many of these objections are primarily intuitive and ignore the fact that nanoscale analogs of macroscale gears, motors, struts, and other mechanical components have all been observed in biology (Table 6.2). Biology demonstrates that many machines, including girders, motors, bearings, ratchets, cables, and so forth are quite recognizable and do in fact work at the nanoscale. So why study diamondoid machines instead of biological machines (Section 4.4), when biology is already known to work? Diamondoid building materials have substantial and useful advantages over biological materials – particularly physical strength, mechanical rigidity, reduced thermal vibrations and friction, chemical inertness and durability, etc. – so these materials are worth studying for nanorobotics applications, and worth working towards.
How can we have any confidence that macroscale-inspired rigid-material machine designs will work at the nanoscale? It is well-known that some macroscale motifs, if implemented in MEMS today, would work poorly if at all. One example is the sliding interface, as might be found in conventional macroscale bearings and pistons, which would become nonfunctional in a contemporary micron-scale MEMS device. One critic [15] notes that nanodevices with such moving parts face the problem of friction and sticking – or “stiction” – because small devices have very large surface/volume ratios. Hence, he concludes, there is no “reason to assume that nanomachines must resemble human-scale machines.”
But designers of these nanomachines have made no such assumptions. Rather, they have undertaken detailed mathematical [208, 3050] and computational studies [208, 222, 223] of de novo molecular machine components to help ascertain which designs might be expected to function as desired at the nanoscale. For example, recognition of the “stiction” issue dates back to at least 1959 when Feynman [2182] suggested running bearings dry. It was subsequently analyzed in greater detail in 1987 by Drexler [3049], who examined the symmetry considerations involved in making bearings that exhibit low static friction. The issue was again analyzed in Nanosystems [208], including the more general case of two surfaces sliding over each other. Merkle [3050] also considered specific examples of nanoscale bearings and concluded that properly-designed components having very low static friction should be feasible. Molecular dynamics simulations of atomically-specified nanoscale gear and pump designs by research groups at NASA [222] and CalTech [223] show that these devices should function well even when operated at speeds well in excess of design specifications. Experimental evidence that molecules can rotate freely in an appropriate environment is overwhelming. This evidence includes, for instance, the work of Gimzewski [3082] showing that the rotation of individual molecules on a surface can be stopped or started by changes in the local molecular environment, the work of Cumings and Zettl [3083] demonstrating near-frictionless sliding of nested carbon nanotubes, and the common observations that molecules can rotate freely around a single bond and that even fairly large molecules often move freely on a surface.
Note that bearings and sliding surfaces are often of very low quality when manufactured using existing lithographic methods, involving surfaces that are imperfectly characterized and are, at the molecular scale, very rough. Properly fabricated molecularly precise surfaces should be able to slide over each other with little friction or wear [3083] for extended periods of time. While it is true that “we have a long path to travel before we can produce nanomechanical devices in quantity” [15], this is an assessment of the current primitive state of molecular systems engineering, not a description of a fundamental barrier presented by physical laws.
More generally, the claim that we should not explore molecular scale designs that happen to resemble macroscale designs is ill founded. One basic premise is that positional assembly at the molecular scale should greatly increase the range of molecular-sized structures that we can fabricate. Most existing molecular machines do not use positional assembly (with the notable exception of the ribosome, which employs positional assembly in a rudimentary form; Section 4.2), and hence need not – and do not – deal with the issue of how to position molecular parts under programmatic control.
If we wish to position molecular parts, then we must ask what a molecular-scale positional device should look like. Should it resemble a small STM that uses piezoelectric effects to move in X, Y and Z? The major drawback of this approach is that piezocrystals move only a small percentage of their total length. If we want a range of motion of 100 nm, and if the piezo changes length by 1% when voltage is applied, then our “molecular” positional device will be ~10,000 nm or 10 microns in size. By contrast, a positional device that more closely resembles a macroscale robotic arm might be 200 or 300 nm in size while providing the same range of motion.
In other words, the same basic issues that drive the design of macroscale robotic arms are still present and have a major influence at the molecular scale. If we want a large range of motion in a compact space, then the human arm (which has a range of motion of about 1 meter, and is about 1 meter in length) is not a bad design approach. If we want programmable motion, then joints that can rotate, extend, and contract are very useful. Power subsystems that convert electrical or other forms of energy into rotary and linear motion continue to be useful, and for much the same reason.
Positional assembly at the molecular scale is novel, so we should not expect that it will lead to “familiar” designs (that is, designs that resemble existing well-studied biological systems). Because many of the fundamental design goals and design constraints are similar to the goals and constraints seen in larger designs, we should not be too surprised to find that molecular-scale designs for positional devices often resemble their larger counterparts.
The argument that molecular-scale designs that resemble macroscale designs are “naive” or “unworkable” also reflect a lack of familiarity with the fundamental objectives of positional assembly at the molecular scale. Today’s chemistry is based on self-assembly. Therefore it should not be too surprising that those who have spent their entire professional lives learning how to synthesize molecular structures in the absence of positional assembly should find approaches based on positional assembly to seem unusual and unfamiliar.
Last updated on 1 August 2005
{kind=link}