Kinematic Self-Replicating Machines
© 2004 Robert A. Freitas Jr. and Ralph C. Merkle. All Rights Reserved.
Robert A. Freitas Jr., Ralph C. Merkle, Kinematic Self-Replicating Machines, Landes Bioscience, Georgetown, TX, 2004.
3.13 NASA Summer Study on Self-Replicating Systems (1980-1982)
By the late 1970s the idea of self-replicating robots had been suggested in various popular writings [1030-1043], and was beginning to be mentioned, however fleetingly, in more technical publications [1046-1048] – although, as noted by Heer [1049], the concept had “acid-tongued opponents as well as supporters.”* Recognizing the tremendous potential for advanced automation in future space mission planning and development, and suspecting that NASA might not be utilizing fully the most recent results in modern computer science and robotics research, in 1977 Stanley Sadin at NASA Headquarters requested Ewald Heer at the Jet Propulsion Laboratory (JPL) to organize the NASA Study Group on Machine Intelligence and Robotics, chaired by the noted astronomer Carl Sagan. The Sagan Study Group was composed of many leading researchers from almost all major centers in the fields of artificial intelligence, computer science, and autonomous systems in the United States. It included NASA personnel, scientists who worked on previous NASA missions, and experts in computer science who had little or no prior contact with NASA.
* In 1996, George Friedman [988] lamented that “while still at JPL, [senior aeronautical engineer] Jim Burke tried repeatedly and unsuccessfully to interest the scientific community at Cal Tech and JPL in establishing a prize for the first autonomous self-replicating system. At meetings I attended with the head of JPL’s Automation and Robotics activity and the director of USC’s robotics laboratory, I was told that – for the scientific and exploration missions they were addressing – self-replication was too difficult, required too long a research schedule and was not necessary anyway.”
The Sagan Study Group met as a full working group or as subcommittees between June 1977 and December 1978, devoting some 2500 man-hours to an examination of the influence of current machine intelligence and robotics research on the full range of space agency activities and recommending ways that these subjects could assist NASA in future missions [1050]. The eye-opening conclusions of the Sagan Group were that NASA was 5-15 years behind the leading edge in computer science and technology, that (unlike its pioneering work in other areas of science and technology) NASA’s use of computer science had been conservative and unimaginative, that the overall importance of machine intelligence and robotics for NASA had not been widely appreciated within the agency, and that the advances and developments in machine intelligence and robotics needed to make future space missions economical and feasible would not happen without a major long-term commitment and centralized, coordinated support.
Upon learning of these conclusions, the NASA Advisory Council (NAC) convened a New Directions Workshop at Woods Hole in June 1979. The NAC, a senior group of scientists, engineers, sociologists, economists, and authors chaired by William Nierenberg (Director, Scripps Institute of Oceanography) had become concerned that people in the space program “might have lost some of their creative vitality and prophetic vision of the future” [1051].* Before setting off for Woods Hole, 30 workshop members assembled at NASA Headquarters for briefings on the agency’s current program and long range plans, the projected capabilities of the Space Transportation System (the Space Shuttle), and various interesting concepts that had not yet found their way into formal NASA planning. The Workshop members then divided themselves into eight working groups, one of which, the Telefactors Working Group [1052], was charged with examining possible future applications of very advanced automation technologies in space mission planning and implementation.
* To complete the historical record, Robert Frosch [1053] recalls: “The origins of the 1979 Woods Hole Workshop were something of a ‘put up job’. Bill Nierenberg and I had discussed the atmosphere at NASA, and thought that very high level encouragement of broader and wilder scientific and technological thinking would be a good thing. We thought the NASA Advisory Council (NAC) would be a good vehicle for doing this, and that direct involvement of the members of the NAC would be good for them and for the Agency. So....we cooked up the summer workshop, using a pattern that had been well established by the National Academies and the National Research Council, and, indeed, used the Academies’ facility in Woods Hole. Personally, I also regarded it as a chance to engage in some deeper thought about possible NASA long range directions than I usually had time for. I have a happy nostalgic memory of the workshop, at which I spent most of my time with the Telefactors Working Group. As I recall, that group included Barney Oliver of HP, and, for much of the time, James Michener, and the discussions were lively and interesting. I think the workshop had some useful effect on the agency and its future ideas, but not as much as we had hoped. Certainly, we were never able to give self-replication as much push as I would have liked. Too many other problems got in the way, and then the Administration ended and I turned to other subjects and technologies. I still think that NASA has not really used teleoperation and robotics in the ways it could and should. The space station should be much more advanced in this way than it is. I think self-replication holds great promise, especially for making the economics of exploration of the solar system and the universe possible. However, it will take a new view of what constitutes partnership between people and their technology.”
The Telefactors Working Group recognized that the cost of traditional space operations, even if transportation became relatively inexpensive, made many proposed large-scale enterprises so expensive that they were not likely to gain approval in any foreseeable funding environment. Long delays between large investments and significant returns made the financial burden still less attractive. The crux of these difficulties was the apparent need to carry fully manufactured machinery and equipment to generate useful output such as oxygen, water, or solar cells in situ. The Group decided to see if the feasibility of certain large-scale projects could be enhanced by using machines or machine systems that could replicate themselves from energy and material resources already available in space. Such devices might be able to create a rapidly increasing population of identical self-replicating factories, which population could then produce the desired finished machinery or products.
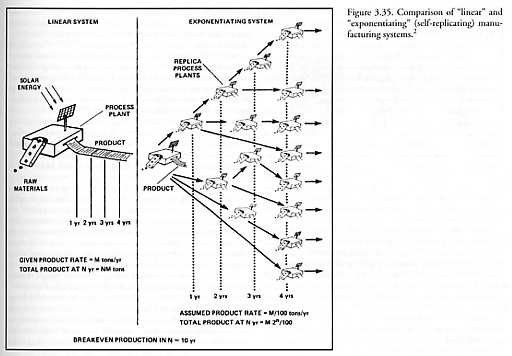
To demonstrate the power of the self-replication technique in large-scale enterprises, the Telefactors Working Group assumed a sample task involving the manufacture of 106 tons of solar cells on the Moon for use in solar power satellites. A goal of 500 GW generating capacity – to be produced by entirely self-contained machinery, naturally occurring lunar materials, and sunlight for energy – was established. Starting with an initial investment estimated at $1 billion and having placed a 100-ton payload on the surface of the Moon, a nonreplicating or “linear” system would require 6000 years to make the 106 tons of solar cells needed – clearly an impractical project – whereas, a self-replicating or “exponentiating” system would need less than 20 years to produce the same 106 tons of cells (Figure 3.35). The theoretical and conceptual framework for self-replicating automata was known to exist, though it had never been translated into actual engineering designs or technological models. In practice, this approach might not require building totally autonomous self-replicating automata, but only a largely automated system of diverse components that could be integrated into a production system able to grow exponentially to reach any desired goal. Such systems for large-scale space use would necessarily come as the end result of a long R&D process in advanced automation, robotics, and machine intelligence, with developments at each incremental stage finding wide use both on Earth and in space in virtually every sphere of technology. The Group recommended [1052], in part, that NASA should “identify minimum feasible systems of this type and consider the possibility of laboratory demonstrations.”
As a result of this workshop, NASA decided in September 1979 to fund a major automation feasibility study to be conducted the following year as one of its annual joint NASA/ASEE Summer Study programs. To help provide the Summer Study with a set of futuristic goals and possibilities, an interactive symposium [1054] was organized by Robert Cannon at the request of NASA Administrator Robert Frosch to take place the week before the opening of the summer session. Accordingly, during the week of 15-22 June 1980, 23 scientists, professors, NASA personnel, and science fiction authors (including Larry Niven and Jerry Pournelle) gathered at Pajaro Dunes near Monterey, California, to consider two specific questions: (1) What goals involving self-replicating telefactors might NASA possibly pursue during the next 25, 50, or 100 years, and (2) what are the critical machine intelligence and robotics technology areas that need to be developed? A large number of highly imaginative missions were discussed, including an automated unmanned (or nearly so) manufacturing facility consisting of perhaps 100 tons of the proper set of machines, tools, and teleoperated mechanisms to permit both production of useful output and replication to make more factories. This mission appears to have generated the most excitement among the symposium participants, in part because it had not yet been extensively studied by NASA (or elsewhere) and the engineering problems were largely unexplored.
Immediately following the conclusion of the brief Pajaro Dunes symposium, the full summer study, entitled “Advanced Automation for Space Missions,” was convened on 23 June 1980 at the University of Santa Clara in California, completing its formal work (roughly 10,000 man-hours) on 29 August 1980 (Figure 3.36) at a cost of under $1 million, with the final report, edited by Freitas (also a Study participant), appearing in 1982 [2]. During the first two weeks of the 1980 Study, the participants (which included 65 scientists, engineers, professors, and NASA personnel, but no science fiction writers) were introduced to the status of work in artificial intelligence and current NASA programs by a series of lectures given by scientists from SRI International and a number of NASA program engineers. Study members initially organized into three mission teams to focus on space missions which appeared to have great potential for automation with high relevance to future NASA program goals. One of these three mission teams was titled “nonterrestrial utilization of materials” (NTM) and was to examine the partial automation of a space manufacturing facility (i.e., conventional “bootstrapping”; Section 3.9). The Study leadership informally decided to avoid any direct consideration of the more controversial topic of fully self-replicating systems.
Just months earlier, however, NASA Administrator Robert Frosch had delivered a bold speech [1055] before the influential Commonwealth Club of San Francisco, describing the potential benefits of fully self-replicating systems.* During the third week of the 10-week Summer Study (and once again in Week 5 or 6), Frosch joined the group’s deliberations and insisted that some effort should be made to explicitly address the question of fully self-replicating systems. This executive call to action (in Week 3) encouraged four members (Rodger A. Cliff, Robert A. Freitas Jr., Richard A. Laing, and Georg von Tiesenhausen) of the NTM team to break away and establish their own fourth mission team – the Replicating Systems Concepts (RSC) Team – whose work ultimately came to dominate the final report and generated the greatest public interest. (The final administrative report [1056] erroneously recorded that all four teams existed from the start.) Interestingly, three of the four rebels – Freitas [1014, 1089], Laing [556-563], and von Tiesenhausen** [1088] – had already published their own work in replicating systems theory or design prior to joining the NASA Study; and all four Team members – Cliff [1057], Freitas [1075-1081], Laing [1082], and von Tiesenhausen [1090] – published further work in this area after the conclusion of the Study. Four other NASA Study participants, perhaps emboldened by the RSC Team’s efforts, later published work describing or picturing machine self-replication [1072-1075], and the Team quietly received additional informal intellectual support from many other Study participants. Subsequently the RSC Team’s results were widely reported in the popular media [477, 1058-1072] and elsewhere [1083-1087], elicited three post-Study papers by authors associated with NASA [1090-1092], and directly inspired the writing of at least one science fiction novel, by James P. Hogan [694], a similar lunar factory study by the Japanese Space Agency*** [1069], a 1984 University of Notre Dame Master’s Thesis [1093], a legal analysis of nanotechnology replicators [2965], and several online fan clubs [1094-1096].
* The relevant portions of NASA Administrator Robert Frosch’s September 1979 speech [1055] bear repeating:
“Given our current technology, and assuming that the initial economic and engineering push to build up to self-sufficiency in the use of extraterrestrial energy and materials would have to be supplied from the Earth, the initial investment requirements by anybody’s computation would be very large, in the order of hundreds of billions of dollars. However, there is an intriguing approach to this problem suggested by Freeman Dyson that would detour around the difficulty and provide self sufficient access to the resources of the solar system for a relatively manageable investment. The key to this idea is the construction of a machine which either totally automatically, or with minimal human intervention and guidance, can use solar energy and local materials on the Earth, or on the Moon, or on an asteroid or elsewhere in the solar system to build a replica of itself. Then the machines can construct generation after generation of machines; the total quantity of machines grows exponentially as biological generations grow, rather than linearly, as is the case with an ordinary factory that simply turns out a product.
“This is interesting because of the possibility that such a machine could consist of a solar energy plant plus the manufacturing capability to build another like itself including the solar energy plant. Thus the proliferation of machines would not only entail proliferation of factories having the capability to build factories like themselves, but at the same time would be building a large-scale solar energy plant....It appears possible to start with the investment necessary to put 100 tons of machinery on the Moon and after 20 years of machine reproduction to have an energy plant and manufacturing capability equivalent to the ability to manufacture 20 billion pounds of aluminum a year. I choose aluminum as an example material because it is particularly energy intensive to extract, not because it is necessarily the most interesting material or product. The point is that it appears that one can use machines in a pseudo-biological way to establish a productive machine economy in an extraterrestrial place using extraterrestrial materials and solar energy. This would produce an economic base upon which further exploration of the solar system could be built, and indeed an economic base of tremendous intrinsic potential value for the human race.
“This idea depends entirely on the ability to build a replicating or nearly self-replicating machine. Theorems demonstrating that this is possible have been around for over 15 years, and the idea appeared in fiction long before that. What is different now is that we are very close to understanding how to build such machines. Indeed, I believe that the technology is presently available and that the necessary development could be accomplished in a decade or so. We are now examining such a program both because of its large implications and because of its parochial implications for making it economically possible to continue the great human adventure of exploring our neighborhood, the solar system, and perhaps eventually the universe in which we are embedded.”
Five months after these remarks were made, and just four months before the start of the 1980 Summer Study, the usually futurist-friendly Omni Magazine reported Frosch’s comments [1097] with skepticism: “This scenario is a bit of a bombshell, coming as it does from the normally conservative Frosch. It also came as a bit of an embarrassment to some NASA officials, who say in private that the agency doesn’t have an in-depth plan for self-replicating robots.”
Just six months later, NASA was given one such plan – but the incoming agency leadership (probably encouraged by institutional resistance) chose not to fund it. Omni Magazine eventually reported this plan, albeit too late, in a July 1983 full-length article on self-replicating robots written by Freitas [1080]. In a personal letter [1098] to Freitas in June 1983, Robert Frosch lamented: “I continue to be interested in SRS, but know of no one now working seriously on it, nor have I talked on it further. Although I continue to consider it an important subject, I have had to work on other matters.”
** Georg von Tiesenhausen was the assistant director of the Advanced Systems Office at NASA’s Marshall Space Flight Center in Huntsville, Alabama. He was formerly a member of the German team of scientists that developed the V2 rocket during World War II, and later came to the U.S. to help launch the American space program. After the NASA summer study was over, von Tiesenhausen [1099] told Freitas that he (GvT) had submitted an official NASA RTOP (Research and Technology Operating Plan) for a new study on replicating systems and methodologies for achieving closure, but evidently nothing ever came of this effort.
*** Bob Johnstone reported [1069] in 1994 that Japan had developed a similar plan to build research facilities on the Moon. According to one summary: “Japan is considering a plan to construct a lunar station by 2024, built entirely by robots. The proposal includes a first phase, 1999-2005, to land a rover to survey possible sites; a second phase, 2006-2016, to construct pilot plants for the production of food, oxygen and energy; and a third phase, 2017-2023, to build the full-scale facilities, including living quarters for people. The plan includes a permanent staff of six people. International partners would be welcome but are not seen as an essential precondition.” Suthakorn [1287] adds: “Research showed that the budget and time requirements could be reduced up to ten times if fully robotic systems were used in this project instead of humans.”
The RSC Team proposed the design and construction of an automated, multiproduct, remotely controlled or autonomous, reprogrammable lunar factory able to construct duplicates (in addition to manufacturing productive output) that would be capable of further replication. Achieving such a factory was to involve a three-stage development approach.
In stage 1, a technology feasibility demonstration of a rudimentary self-replicating system would be performed. The simple replicating system envisioned for stage 1 was a computer connected to one or more manipulators. Under control of the computer, the manipulators would assemble another computer and another set of manipulators from well-defined subassemblies. Examples of these subassemblies are printed circuit cards for the computer and individual joints or limb sections for the manipulators.
In stage 2, the demonstration robot replicator is further refined to produce a less rudimentary system which operates in a less structured environment. Subassemblies would now be assembled from still smaller sub-subassemblies including individual integrated circuit chips, and from discrete electronic and mechanical components such as resistors, motors, bearings, shafts, and gears. Stage 2 would proceed for an extended time as the techniques for assembling each subassembly from sub-subassemblies were developed and implemented one by one.
In stage 3, the previous system would be further expanded in its capabilities, with the manipulators that were used in stages 1 and 2 to assemble robots from ever-smaller parts now used additionally to build the machines which can make the parts. For example, the manipulators would assemble a printed circuit board manufacturing machine or a gear manufacturing machine. This extension of capabilities would ultimately lead to the achievement of a teleoperated, and later a fully autonomous, self-replicating manufacturing facility.*
* When some of the work of the RSC Team [1075] was first presented to scientific peers at the Fourth Space Manufacturing Conference in May 1981, Manufacturing Section Chairman Charles Rosen, founder of the Robotics and Automation Division of Stanford Research Institute and chief scientist of the Machine Intelligence Corporation, called it “one of the most important papers in this volume...this growing lunar factory would use as much nonterrestrial material as possible....[and] by replicating that factory as it grows, other factories could be made.” Rosen had been involved as a principal automation consultant in the earlier SSI work [2690] on bootstrapping space manufacturing (Section 3.9). During the discussion which followed [1100], Rosen added: “I am presently attempting to get the National Science Foundation and other groups to put some of their research money into developing self-replicating robots. But it is important to recognize that a complex robot is not essential to make a useful machine. It is possible to design a modular growing robot system, like the early lathes that could produce parts that could make better lathes, which then could produce parts that made better lathes, and so on. But this exercise has not been done. It is a concept that has yet to be explored, although I have very little doubt that if it is useful on Earth it will be explored.” Unfortunately, Rosen’s initiatives were never funded by NSF, nor, following the exit of Robert Frosch with the change of Presidential Administration in 1981, by NASA [477].
The RSC Team produced three distinct proposals for kinematic machine replicators, as described below.
Last updated on 14 June 2007
{kind=link}
{kind=link}