Kinematic Self-Replicating Machines
© 2004 Robert A. Freitas Jr. and Ralph C. Merkle. All Rights Reserved.
Robert A. Freitas Jr., Ralph C. Merkle, Kinematic Self-Replicating Machines, Landes Bioscience, Georgetown, TX, 2004.
4.1.5 Self-Assembly of Mechanical Parts and Conformational Switches
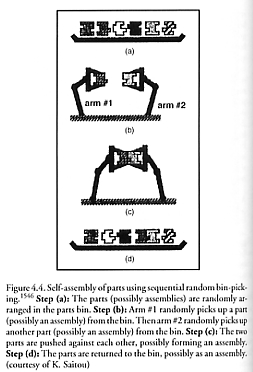
Several attempts have been made to achieve self-assembly of small mechanical parts to avoid direct parts grasping [1341-1345]. Saitou [1546] gives a simple example of “sequential random bin picking” in which a process of sequential mating of a random pair of parts drawn from a parts bin which initially contains a random assortment of parts can produce the mating of a desired pair of parts (Figure 4.4). It is already known that self-assembling molecular systems can be made to self-replicate if the components have sufficient complexity. An example in biology is offered by the bacteriophages (Section 4.3.3), viruses that infect and commandeer a bacterial cell’s replication mechanism to synthesize their own component molecules such as nucleic acids and proteins [1547, 1548]. Spontaneous self-assembly of the component viral proteins then occurs which produces hundreds of virus offspring in the host cell. While new viruses are formed via self-assembly of randomly arranged and randomly moving component protein molecules, the various component molecules do not associate with one another at random during the assembly process but rather associate in a definite sequence. Biologists believe that conformational switches in protein molecules facilitate this sequential self-assembly of bacteriophages. In a protein molecule with several bond sites, a conformational switch causes the formation of a bond at one site to change the conformation of another bond site. As a result, a conformational change which occurs during one assembly step provides the essential substrate for assembly at the next step [1694]. Smith [1456] has described a self-assembled fluorescent conformational switch using DNA scaffolds containing several targeted proteins.
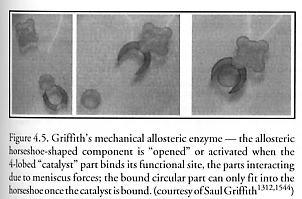
Griffith [1544] also complains that existing self-assembling systems are “essentially meso- or macro-scale versions of crystallization”* and suggests expanding the toolbox of self-assembly by including dynamic components that emulate enzymatic allostery. Figure 4.5 shows Griffith’s “mechanical enzyme” analog – a 2-bit mechanical state machine that programmatically self-assembles while floating at an interface between water and poly-fluorodecalin. The mechanical state machine has a mechanical flexure that acts as the ‘switch’ in the state machine, making a mechanical allosteric enzyme. “The problem in designing self-assembling components is to avoid undesirable metastable states, and to make the desired assembled geometries the lowest energy conformations of the system,” Griffith observes. For example, “you will observe in Figure 4.5 that there are no straight edges on the components to avoid local energy minima on their collision.” Griffith [1312] explains further: “The key in designing such systems is that the parts must fall through a cascade of increasingly lower energy states, each corresponding to one of the logical states desired. The difficulty comes in designing a system with those energy troughs. One particularly difficult aspect is that one must not only design for the desired states, but considering that all components are free to interact in solution, one must design the non-desirable interactions to have very low binding energy such that they will not stick permanently. Note that this is a simple 3-component, 2-state system. This quickly becomes an incredibly difficult task as the number of states and components in the system increases. One must take solace in the fact that biology had billions of years to evolve many non-competing allosteric state machines and uses three dimensions, not just two.” Griffith notes that he is “making progress on a 3-state system, however it is a problem of increasing difficulty, and as more component types are added to a system the challenge is to avoid any undesirable local energy minima” – necessitating the development of energy vs. orientation modeling tools [1544]. He has also set a goal of finding an analogy to protein folding that will allow the folding of linear strings of mechanical parts into 2-D and 3-D structures which are voidless space-filling final objects [1312]. (See Section 3.28.)
* A simple form of surface-tension-driven fluidic self-assembly has been illustrated with LEGO® blocks, which upon agitation form a square pattern while floating on water [1545].
The programming of engineered sequences of such conformational switches can allow the self-assembly of quite complicated mechanical structures. Saitou [1546-1551] has presented a model of self-assembling systems in which assembly instructions are written as conformational switches – local rules that specify conformational changes of a component. The model is a self-assembling automaton explicitly inspired [1546] by the Penrose [683] self-replicating blocks (Section 3.3) and by Hosokawa’s self-assembling triangular parts with embedded switches [1552]. It is defined as a sequential rule-based machine that operates on one-dimensional strings of symbols. An algorithm is provided for constructing a self-assembling automaton which self-assembles a one-dimensional string of distinct symbols in a particular subassembly sequence. Classes of self-assembling automata are then defined based on classes of subassembly sequences in which the components self-assemble. For each class of subassembly sequence, the minimum number of conformations is provided which is necessary to encode subassembly sequences in the class. Finally, it is shown that three conformations for each component are enough to encode any subassembly sequence of a one-dimensional assembly of distinct components, having arbitrary length. Saitou claims [1546] his model of self-assembling automata can also be applied to self-assembly in 2- or 3-dimensions (in particular, to “the assembly of micro- to mesoscale components for microelectronic applications,”) an extension which might eventually permit the design of physical systems capable of self-replication via self-assembly.
Programmable self-assembly has also been examined by Nagpal [1553] who asked how one might achieve a particular global shape or pattern from the local interactions of vast numbers of parts, in a robust and decentralized way, and what the appropriate local and global programming paradigms for engineering such systems might be. Nagpal presented “a language for instructing a sheet of identically-programmed, flexible, autonomous cells to assemble themselves into a predetermined global shape. A wide variety of global shapes and patterns can be synthesized, using only local interactions between identically-programmed cells. The global shape is described as a folding construction on a continuous sheet, using a language based on Huzita’s axioms of origami. The program executed by a cell is automatically compiled from the global description, which is in contrast to approaches based on cellular automata and evolution. The cell program is inspired by developmental biology and is composed from a small set of primitives. The cell programs do not rely on regular cell placement, global coordinates, unique global identifiers, or synchronous operation, and are robust in the face of a small amount of random cell death.” Saul Griffith’s related work on programmatic self-assembling systems [1544] has been mentioned earlier, and the work of Hogg et al [1554] and DeHon et al [1555] should also be mentioned in this context.
Guided [1556-1564] or directed [2163-2167] self-assembly has become a growing research area. Hogg [1565] has also examined the designability of self-assembled structures, Yeh and Smith [1345] have described a process of fluidic self-assembly of optoelectronic devices, Rothemund and Winfree [1566] have described a tile assembly model for pseudocrystalline self-assembly, and Breivik [1567] has designed and patented a set of self-replicating physical polymers. Gracias et al [1568] have impressed electrical circuits including LEDs on the surfaces of copper-polyimide truncated octahedra each ~1 mm in diameter, then induced these octahedra to self-assemble into specified 3-D electrical networks of up to 12 devices by co-melting opposing solder spots. (Gracias notes that hierarchical self-assembly [1569] and shape-selective self-assembly using lock-and-key structures [1570-1573] “offer more sophisticated strategies for the fabrication of asymmetrical networks incorporating more than one repeating unit.”) Whitesides et al [1574-1579] first demonstrated capillary-force driven assembly of a simple circuit and other structures from millimeter-scale components, and also magnet-driven fluidic self-assembly [2336] and electrostatic self-assembly [1580]. Some of this work has since been extended to the microscale [1346-1356], including “micro-origami” [2445-2448], “silicon origami” [1581, 1582], and mesoscopic nucleic acid analogs [1583].
As one final observation, Crane [1584] long ago considered the principles for the assembly of larger parts from smaller parts, and concluded that if imperfect units were cast aside during a hierarchical assembly process, then complex structures could be produced without requiring high accuracy at any step (see also Section 5.9.4).
Last updated on 1 August 2005
{kind=link}
{kind=link}