Kinematic Self-Replicating Machines
© 2004 Robert A. Freitas Jr. and Ralph C. Merkle. All Rights Reserved.
Robert A. Freitas Jr., Ralph C. Merkle, Kinematic Self-Replicating Machines, Landes Bioscience, Georgetown, TX, 2004.
5.7 Massively Parallel Molecular Manufacturing
Complex objects assembled from simpler components may be manufactured either serially or in parallel. In serial assembly, objects are manufactured one at a time by a stepwise manufacturing process. Examples include handcrafted unique items such as an antique pocket watch, classical industrial “mass production” items such as automobiles which emerge only one by one at the end of a linear assembly line, or the traditional serial digital computer which executes instructions one by one in a linear sequence. In parallel assembly, objects are manufactured along many pathways simultaneously or at many different sites, such as polysomes in living cells (multiple ribosomes translating a single mRNA strand simultaneously), mask lithography deposition of multiple circuits simultaneously on a single semiconductor wafer, or the modern parallel computer which at any moment is executing different instructions on thousands or even tens of thousands of independent processors in a highly parallel manner. Parallel manufacturing systems could have many possible control/configuration architectures, analogous to: a SIMD (Single Instruction Multiple Data) approach [2704]; convergent (Section 5.9.4) or fractal [2705-2707] assembly; agoric algorithms [780-783]; stigmergy [2708, 2709], swarm [912, 2710], amorphous computing [2711, 2712], or agent-based [783, 811-814] approaches; kinematic cellular automaton assembly lines [815]; or other manufacturing analogs taken from high-performance parallel computing [815] such as SMP (Symmetric MultiProcessors) [2713-2716], MPP (Massively Parallel Processors) [2717], and NOWs/COWs (Networks/Clusters of Workstations) [2714, 2718].
Biology provides perhaps the best example of the power of massive parallelism in assembly. A single ribosome (Section 4.2), able to make a single protein as directed by a single molecule of messenger RNA, is a marvelous manufacturing system. Yet by itself, it would have little economic impact. But multiple millions of ribosomes, operating together in each living cell, can make all the proteins in a tree or – still more quickly – all the proteins in a rapidly growing kelp plant [2719] which can grow up to six inches per day.
The difference between serial and parallel processing is equally crucial in molecular manufacturing where the basic parts are very small. If a typical molecularly precise simple component is 1 nm3 in volume, then to manufacture a single macroscale but molecularly precise 1 cm3 product requires the assembly of 1000 billion billion (1021) individual simple molecular components. With serial manufacturing, just one molecular component is handled at a time – even at a 1 GHz operating frequency it would take many thousands of years, clearly not economically viable. But with parallel manufacturing, vast numbers of molecular components can be processed simultaneously, reducing batch processing times to days, hours, or even less. Massively parallel assembly is the key to the economic viability of molecular manufacturing.
There are two principal pathways for achieving massively parallel assembly of molecularly precise physical structures: self-assembly and positional assembly. In commercial chemical synthesis, self-assembly usually takes place in fluid phase among mole (~1023) quantities of reactant molecules, which interact to produce mole quantities of product molecules. In Seeman’s experiments [1448] producing DNA-based structures and in other related experiments involving supramolecular or biomolecular self-assembly (Section 4.1), the yield of product objects per batch may be vastly less than mole quantities but is still quite large by conventional standards in macroscale manufacturing. The inherent parallelism of self-assembly is the main advantage of this pathway over positional assembly in manufacturing.
In order to overcome this advantage and reap the full benefits of flexibility, precision and quality in 21st century molecular manufacturing using positional assembly – also known (in the context of molecular manufacturing) as machine-phase nanotechnology – new techniques for massively parallel positional assembly must be developed. At least two such techniques have already been clearly identified: (1) massively parallel manipulator arrays and (2) self-replicating manipulator systems.
(1) Massively parallel manipulator arrays would use a very large array of independently actuated manipulation devices (e.g., scanning probe tips, robot arms, etc.) to process a very large number of molecularly precise components simultaneously to build a larger product object. In order to produce large numbers of nanoparts and nano-assemblies, massively parallel scanning probe microscope (SPM) arrays [2720, 2721] and microscale SPMs [2722-2725] would be most convenient. Force-sensing devices such as piezoelectric [2726], piezoresistive [2727], and capacitive [2728] microcantilevers made it possible to construct microscale atomic force microscopes (AFMs) on chips without an external deflection sensor. (We exclude fixed-tip arrays [2729, 2730] in the following discussion.) In 1995, Itoh and colleagues [2731] at the University of Tokyo fabricated an experimental piezoelectric ZnO2-on-SiO2 microcantilever array of ten tips on a single silicon chip. Each cantilever tip lay ~70 microns from its neighbor, and measured 150 microns long, 50 microns wide and 3.5 microns thick, or ~26,000 micron3/device, and each of the devices could be operated independently in the z-axis (e.g., vertically) up to near their mechanical resonance frequencies of 145-147 KHz at an actuation sensitivity of ~20 nm/volt – for instance, 0.3-nm resolution at 125 KHz.
Parallel probe scanning and lithography has been achieved by Quate’s group at Stanford, which has progressed from simple piezoresistive microcantilever arrays with 5 tips spaced 100 microns apart and 0.04-nm resolution at 1 KHz but only one z-axis actuator for the whole array [2732], to arrays with integrated sensors and actuators that allow parallel imaging and lithography with feedback and independent control of each of up to 16 tips, with scanning speeds up to 3 mm/sec using a piezoresistive sensor [2733, 2734]. By 1998, Quate’s group had demonstrated [2735-2742] arrays of 50-100 independently controllable AFM probe tips mounted in 2-D patterns with 60 KHz resonances, including a 10 x 10 cantilevered tip array fabricated in closely spaced rows using throughwafer interconnects on a single chip, and this work continues [2743-2745].
MacDonald’s group at the Cornell Nanofabrication Facility pursued similar goals. In 1991, the team fabricated their first submicron stylus, driven in the xy plane using interdigitating MEMS comb drives [2746], including the first opposable tip pair. By 1993, they had produced a 25-tip array on one xyz actuator [2747, 2748], and by 1995 a complete working micro-STM (including xy comb drives) measuring 200 microns on an edge and a micro-AFM measuring 2 mm on an edge including a 1-mm long cantilever with a 20-nm diameter integrated tip on a 6-micron high by 1-micron diameter support shaft [2749, 2750]. MacDonald’s group then demonstrated tip arrays with 5 micron spacings, exploiting the same process used to make the working micro-STM [2751, 2752]. With the same technology tips or small arrays of tips could be spaced 25-50 microns apart and integrated with individual z-axis microactuators, so that one xy-axis manipulator could support many tips with each tip having a separate z actuator. By 1997, the group [2753] had built and tested an array of micro-STMs on the surface of an ordinary silicon chip, with each tip on a cantilever 150 microns long with 3-D sensing and control. The largest prototype array had 144 probes [2754], arranged in a square consisting of 12 rows of 12 probes each, with individual probe needles about 200 microns apart. Further development was to focus on increasing the range of movement and on fitting more and smaller probes into the same space.
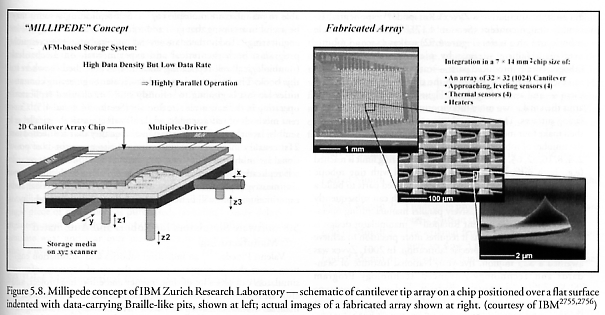
Using conventional microlithography, researchers in the Millipede project at IBM’s Zurich Research Laboratory [2755, 2756] have fabricated scanning probe tip arrays of up to 1024 individual tips (Figure 5.8) to achieve terabit-per-square-inch data storage densities [2757, 2758]. Simpler mechanical ciliary arrays consisting of 10,000 independent microactuators on a 1 cm2 chip have been fabricated at the Cornell National Nanofabrication Laboratory for microscale parts transport applications [2759, 2760], and other ciliary array systems for parts presentation in microscale manufacturing have been reported by many others including the Fujita group [2761-2766], Bohringer and colleagues [2767-2777], Will’s group [2778-2784], Darling, Suh and Kovacs [2785-2787], and others [2788-2793]. Microcantilever arrays for “electronic nose” [2794-2803] and other applications [2006-2009] have also been constructed, in at least one case having millions of interdigitated cantilevers on a single chip [2804]. A probe-array-based “micro-factory” for site-specific deposition of desired molecular feedstock moieties from gas phase onto a planar workpiece surface has been proposed [2805].
Active probe arrays for dip-pen nanolithography using DNA-based “ink” have been developed by Mirkin’s group [2806-2813]. At a Materials Research Society meeting in late 2002 [2026], Mirkin reported that his group had constructed an array of 10,000 microscope tips, each capable of acting independently from the others. By using 10 tips in concert they can draw essentially any desired shape. “The goal is to use dip pen nanolithography to generate [DNA-based] templates on surfaces that guide the assembly of nanoscale building blocks,” Mirkin says. “It opens the door to placing electronic particles right where you want them. We think it’s ultimately going to be a production tool....This is not going to stop at 10,000. We can make arrays of arrays.” Proteins can be laid down in similar manner [1255]. Another approach is the use of independently mobile multiple manipulator platforms such as the NanoWalker system under investigation by Martel’s group [2814-2817]. Martel envisions a fleet [2818] of such wireless instrumented microrobots collectively forming a nanofactory system that could be used for positional nanomanufacturing operations.
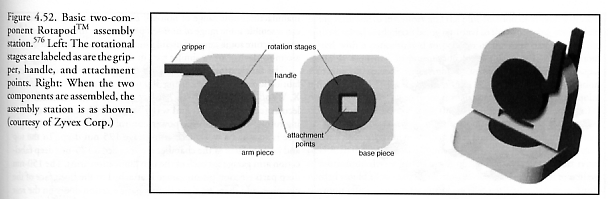
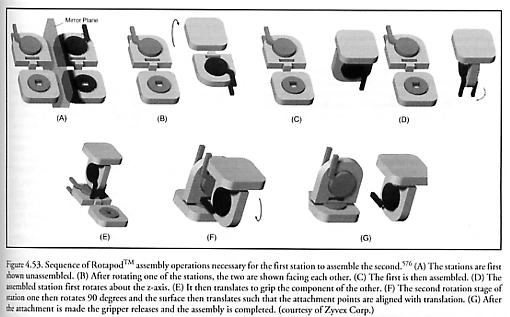
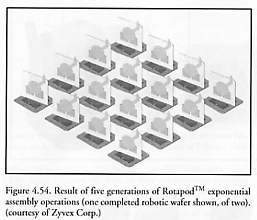
Yet another alternative is Zyvex’s RotapodTM exponential assembly design concept (Section 4.17) [576], in which a single robotic arm on a wafer (Figure 4.52) makes a second robotic arm on a facing surface by picking up micron-size lithographically-produced parts – carefully laid out in advance in exactly the right locations so the tiny robotic arm can find them – and assembling them (Figure 4.53). The two robotic arms then make two more robotic arms, one on each of the two facing surfaces. These four robotic arms, two on each surface, then make four more robotic arms. This process continues with the number of robotic arms steadily increasing in the pattern 1, 2, 4, 8, 16, 32, 64, etc., until some manufacturing limit is reached (e.g., both surfaces are completely covered with tiny robotic arms). Thus a single manipulator uses supplied parts to build a large manipulator array (Figure 4.54) which can subsequently undertake the desired massively parallel manufacturing operations. However, the present RotapodTM manipulator design is still under development as it requires more precision to achieve flexible and molecularly precise fabrication. In 2001, Zyvex was awarded a $25 million, five-year, National Institute of Standards and Technology Advanced Technology Program (NIST-ATP) government contract to develop prototype microscale assemblers using microelectromechanical systems (MEMS) and nanoelectromechanical systems (NEMS) for prototype nanoscale assemblers [2247].
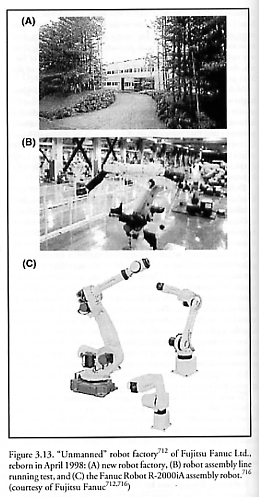
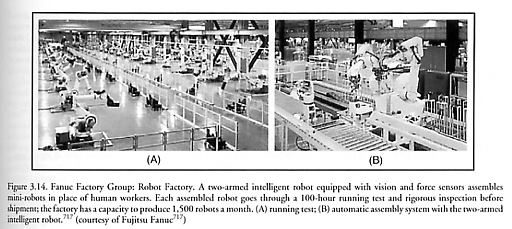
(2) Self-replicating manipulator systems achieve massively parallel assembly first by fabricating copies of themselves, then allowing those copies to fabricate further copies, resulting in a rapid increase in the total number of systems. Once the population of replicated manipulator systems is deemed large enough (Section 5.9.6), the manipulator population is redirected to produce useful product objects rather than more copies of itself. Self-replicating systems are widely found in natural biological systems but have not been pursued explicitly in macroscale manufacturing for at least two reasons: (1) the widespread but erroneous perception of great technical difficulty, and (2) the correct perception that such massive parallelism is unnecessary for traditional macroscale manufacturing. Nevertheless, ever since John von Neumann’s theoretical studies of replicating systems in the 1940s and 1950s, and the well-known 1980 NASA engineering study of self-replicating lunar factories (Section 3.13), manufacturing automation has been slowly progressing toward the goal of the fully self-replicating factory – including most notably Fujitsu Fanuc’s nearly “unmanned” robot factory in Yamanashi Prefecture that uses robot arms to make robot arms (Figure 3.13 and 3.14). It’s worth recalling that self-replicating systems can be fully remote-controlled, fully autonomous, or any combination in between.
Both parallel manipulator arrays and individual replicators can be “self-replicating.” The parallel arrays can build additional parallel arrays, after which the collective population of array manipulators builds useful products. Similarly, the individual replicators can build additional individual replicators, then the collective population of replicators builds useful products. Each approach offers certain advantages and disadvantages – array systems can be more efficient due to positional specialization of workflow processing, while individual replicators are more tolerant of single-component failures – but both approaches exemplify “self-replication.”
In the last few years there has been renewed research interest in the challenge of mechanical self-replicating systems, in part due to the realization that replication can be a fundamentally simple process. For example, Joseph Jacobson at the MIT Media Lab suggests [1930] that “to be useful for many applications, engineered systems must be able to manufacture multiple copies. Self-replicating systems may be useful in attaining that goal and it represents a new discipline in engineering.” Today there are several ongoing university research programs, both theoretical and experimental, on mechanical (nonbiological) self-replicating machines, as described elsewhere in this book. The biotechnology and molecular engineering communities are just beginning to seriously study mechanical replicators operating in the nanoscale size domain (Sections 4.4 and 4.5). Current methods of self-assembly, while allowing massively parallel assembly, lack the flexibility, precision and quality that are needed for 21st century molecular manufacturing. Current methods of positional assembly, including massively parallel manipulator arrays and self-replicating manipulator systems, should allow molecularly precise massively parallel assembly, although further theoretical and experimental work will be required to fully realize this capability.
Last updated on 1 August 2005
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}